
The Shirky Principle: Institutions Try to Preserve the Problem to Which They Are the Solution – Effectiviology

“The Shirky principle is the adage that “institutions will try to preserve the problem to which they are the solution”. More broadly, it can also be characterized as the adage that “every entity tends to prolong the problem it is solving”.
How to Perform Pose Estimation Using an ArUco Marker – Automatic Addison
![]()
Link: How to Perform Pose Estimation Using an ArUco Marker – Automatic Addison: ""
One of many articles helping with the math of computing pose from aruco markers. Unfortunately the algorithms are different and give different results.
By the way the Automatic Addison web site is a treasure trove of robotics ideas, explainers and code.
The Psychology of Human Misjudgment annotated/explained version.
Link: The Psychology of Human Misjudgment annotated/explained version.: "Charlie Munger"
This week we are revisiting “The Psychology of Human Misjudgment" an essay by Charlie Munger. In this essay, Munger discusses a series of 25 Cognitive Biases that induce human misjudgment and provides some of his famous mental models to counter this innate behavior.
It's a great read full of insights: https://fermatslibrary.com/s/the-psychology-of-human-misdgugement [fermatslibrary.com]
The Architect's Guide to Glue and Tape

Link: The Architect's Guide to Glue and Tape: "A comprensive guide to all the different options of glue and tape available for architecture model building."
Everything you want to know -- well I am exaggerating -- about sticky things. I discovered this while working on mounting photographs.
6. Camera Hardware — Picamera 1.13 Documentation
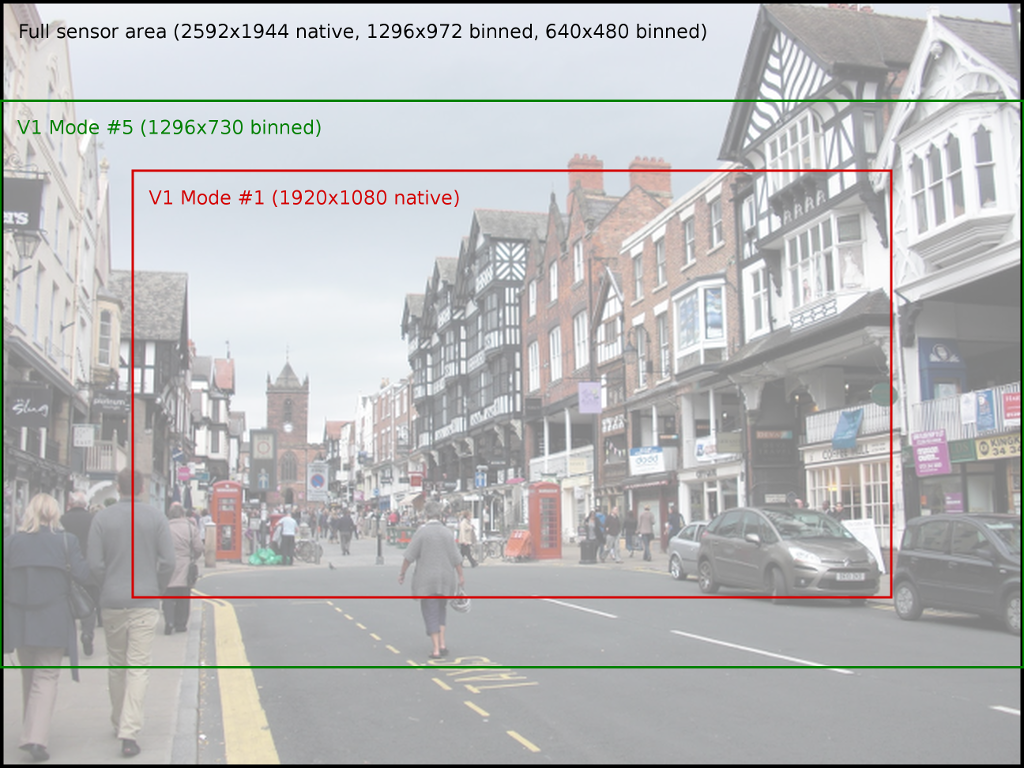
Link: 6. Camera Hardware — Picamera 1.13 Documentation: ""
More than you ever wanted to know about how the PiCamera works. As usual, things are more complex than you expect when you get into them!
v4l2-ctl - cli for managing camera hardware
Link: v4l2-ctl - cli for managing camera hardware: ""
Very useful tool to work with camera parameters. I don’t even know what v4l2 is, but all kinds of camera parameters can be displayed and changed.
ROS Tutorial: How to use OpenCV in a Robot Pick and Place task for Computer Vision - Robotics Casual
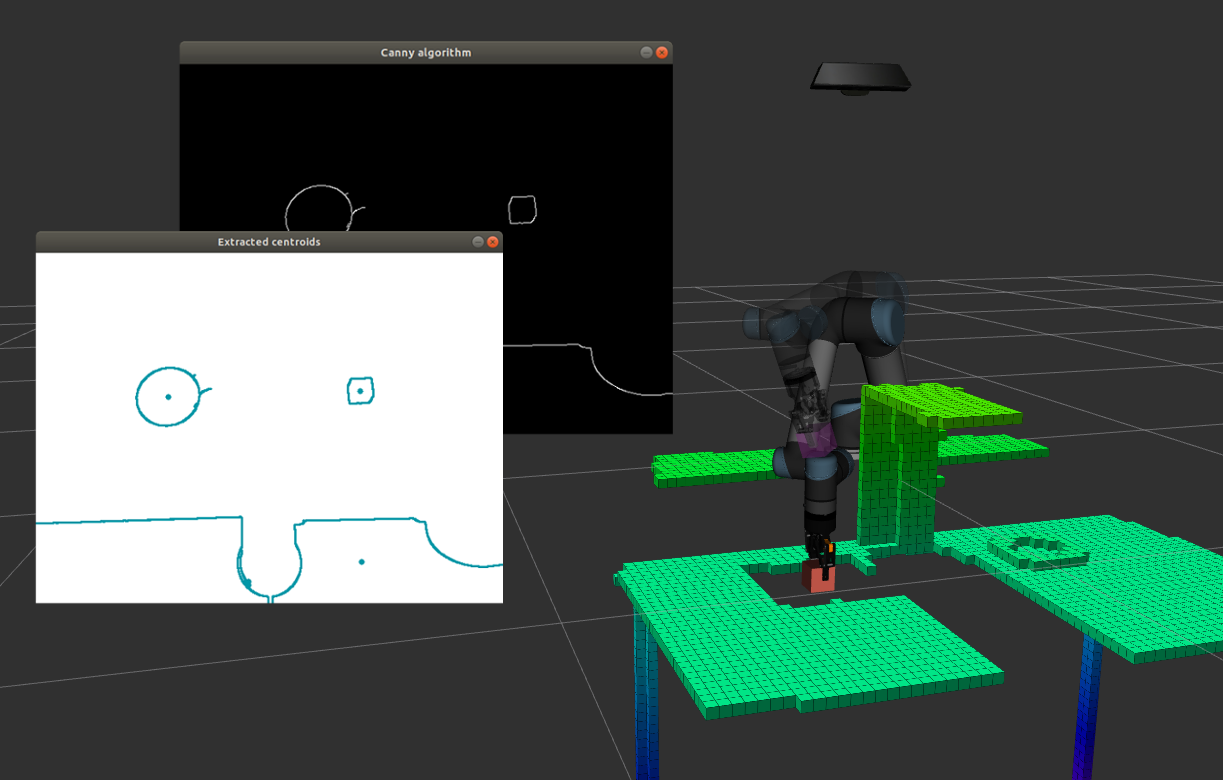
Link: ROS Tutorial: How to use OpenCV in a Robot Pick and Place task for Computer Vision - Robotics Casual: "We learn how to use OpenCV with ROS in a pick and place task and how to apply Computer Visions algorithms to 3D camera data."
A pretty comprehensive tutorial about using OpenCV in ROS Robotics algorithms,
camera_calibration - ROS Wiki
Link: camera_calibration - ROS Wiki: ""
Really Important package to allow you to calibrate the camera. It is here because I lost it for a while (forgot the name) and now I found it again!
Mining of Massive Datasets
Link: Mining of Massive Datasets: ""
Downloadable textbook about Mining of Massive Datasets by Jure Leskovec, Anand Rajaraman, Jeff Ullman.
Debugbar For Ruby on Rails
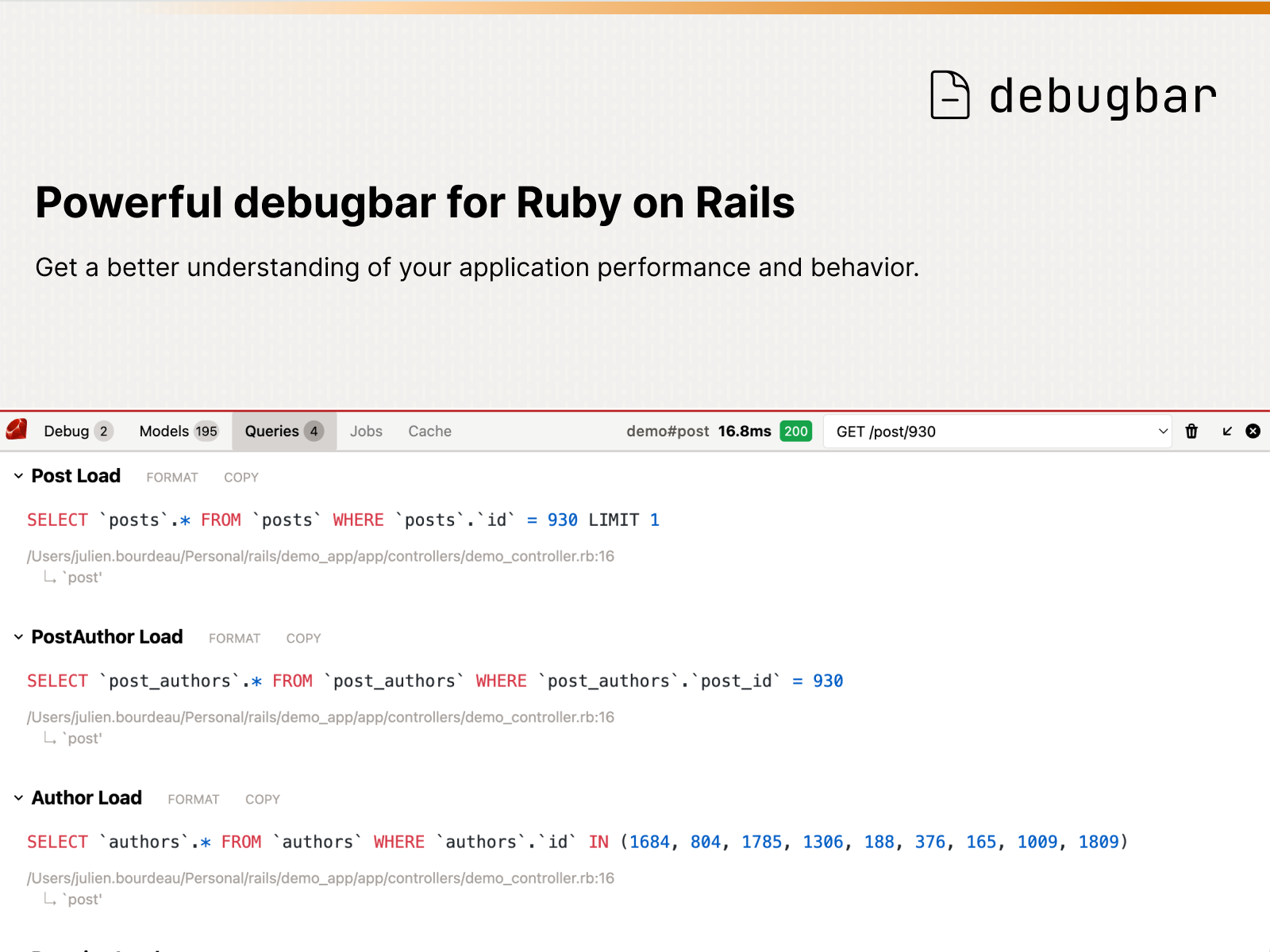
Link: Debugbar For Ruby on Rails: "Rails debugging dev tools for faster development. Inspect your request details (queries, logs, cache, jobs and more)."
This is super useful for rails apps. Will it work for other frameworks like Sinatra? I haven’t tried this yet but it looks promising.