
When to use “raise from None” in Python
Link: When to use “raise from None” in Python: "Learn when and why to use Python's 'raise ... from None' to simplify stacktraces by hiding redundant exception context. Improve debugging clarity by focusing on the actual issue."
Linked is a good article about raising exceptions in python. For me it also showed me some interesting “advanced” (or is it idiomatic) python.
ghostty-org/ghostty: 👻 Ghostty is a fast, feature-rich, and cross-platform terminal emulator that uses platform-native UI and GPU acceleration.
Link: ghostty-org/ghostty: 👻 Ghostty is a fast, feature-rich, and cross-platform terminal emulator that uses platform-native UI and GPU acceleration.: "👻 Ghostty is a fast, feature-rich, and cross-platform terminal emulator that uses platform-native UI and GPU acceleration. - ghostty-org/ghostty"
Linked is a new terminal emulator. What interests me is that it is said to be embeddable because it is distributed also as a library with well defined apis.
Lazy self-installing Python scripts with uv

Link: Lazy self-installing Python scripts with uv: "I frequently find myself writing my own short command-line scripts in Python that help me with day-to-day tasks. It’s so easy to throw together …"
Linked is a good article; in particular I learnt how uv is going to support the functionality of pyenv.
RightTyper/RightTyper: A fast and efficient type assistant for Python, including tensor shape inference
Link: RightTyper/RightTyper: A fast and efficient type assistant for Python, including tensor shape inference: "A fast and efficient type assistant for Python, including tensor shape inference - RightTyper/RightTyper"
Linked is Python RIghtTyper which sounds great... if it works. It will analyze the type hints in your python (if any) and offers to gerentate them for you. Something like that. Many ways in which that might not go right but I read a very positive overview of it!
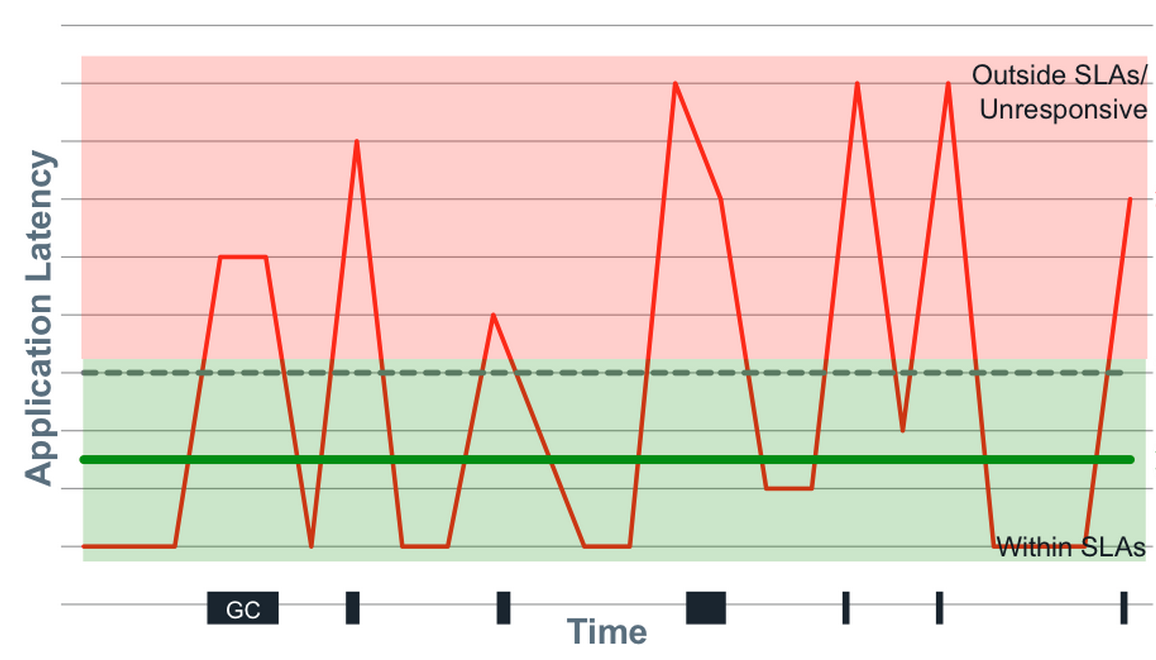
Everything You Know About Latency Is Wrong
Link: Everything You Know About Latency Is Wrong: "Okay, maybe not everything you know about latency is wrong. But now that I have your attention, we can talk about why the tools and methodologies you use to measure and reason about latency are lik…"
Linked is a pretty interesting article about latency and how to think about it.
The Art of Enbugging
Link: The Art of Enbugging: ""
Linked is an amusing article about debugging and enbugging.
The Ruby Toolbox - Know your options!
![]()
Link: The Ruby Toolbox - Know your options!: "Explore and compare open source Ruby libraries"
Linked is one of several comprehensive catalogs of Ruby tools, packages and libraries.
How to Build a Robot Tutorials - Society of Robots
Link: How to Build a Robot Tutorials - Society of Robots: "Build a Robot for Free!"
The linked site has many very helpful and simple instructions and ideas for building your own robot. I just browsed and came across useful information even just the first time through
TimeMap.org - World History Atlas
Link: TimeMap.org - World History Atlas: "The easy-to-use getaway to historical maps in libraries around the world."
Linked is an amazing free tool. It lets you move a slider to shift the year that you are looking at. And then it shows a zoomable map and all sorts of historical info.
How to Calculate the Motor Torque for a Mobile Robot
Link: How to Calculate the Motor Torque for a Mobile Robot: "This guide outlines how to calculate power parameters for a mobile robot and select an appropriate power system. We cover frictional and acceleration forces, wheel type, and motor parameters to design a direct-drive system with a brushless motor. With the rated voltage, speed, and torque of the motor, we calculate the required power and minimum battery capacity to power the robot successfully. This discussion is a valuable resource for designing or selecting a power system for an indoor, service-oriented mobile robot capable of carrying a payload of 20 kg and achieving a speed of 1."
Linked is an article explaining how to calculate torque. But why? When choosing a motor for a robot, you need to calculate the torque required, which in turn depends on the weight of the robot, the diameter of the wheels, and other parameters.