28-03-2022

The Rails Command Line — Ruby on Rails Guides
Source: guides.rubyonrails.org
Simple, efficient background processing for Ruby. Contribute to mperham/sidekiq development by creating an account on GitHub.
Sucker Punch is a Ruby asynchronous processing library using concurrent-ruby, heavily influenced by Sidekiq and girl_friday. - brandonhilkert/sucker_punch: Sucker Punch is a Ruby asynchronous proce...
This article will teach you how background processing works as well as the alternatives the Ruby community offers to implement it in your application.
help to kill N+1 queries and unused eager loading. Contribute to flyerhzm/bullet development by creating an account on GitHub.
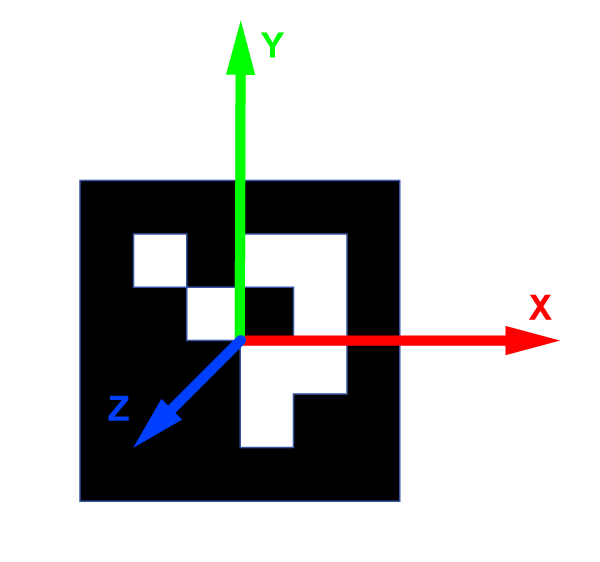
A section from another robot that describes how to use aruco_detect
the calibration using opencv Aruco markers and CCalib

If you're using ROS on a Raspberry Pi board, check out those useful tips for making more robust, high-performance, and scalable robotics projects!
There are many ways to scale out your database; many of these techniques require advanced management and expensive add-ons or editions. Database sharding is a flexible way of scaling out a database. In this presentation, Jeremiah Peschka explains how to scale out using database sharding, covers basic techniques, and shares some of the pitfalls. This...

I’m increasingly encountering users on Heroku that are encountering the need to shard their data. For most users this is something you delay as long as possible as you can generally go for sometime before you have to worry about it. Additionally scaling up your database is often a reasonable approach early on and something I encourage as a starting point as scaling up is easy to do with regards to databases. However, for the 1% of users that do need to shard when the time comes many are left wondering where to start, hence the following guide.
OpiniDatabase sharding is the process of splitting up a database across multiple machines to improve the scalability of an application. The justification for database sharding is that after a certain scale point it is cheaper and more feasible to scale a site horizontally by adding more machines than to grow it vertically by adding beefier servers.
In this tutorial, we will go through the entire process, step by step, of how to detect lanes on a road in real time using the OpenCV computer vision library and Python. By the end of this tutorial, you will know how to build (from scratch) an application that can automatically detect lanes in a video stream from a front-facing camera mounted on a car. You’ll be able to generate this video below.

Browse and download high-resolution, public domain Paintings, Drawings, Illustrations and Posters.

Looks great, but I have not tried it! Foxglove Studio is a visualization and debugging tool for your robotics data, conveniently packaged as a desktop app.
ROS use OpenCV for camera calibration but the format that it stores the data is different than OpenCV. Also, you need to know where to place the camera calibration files so ROS can find it and publish it. 1.First, you need to install usb cam package from ROS and uvcdynctrl to disable autofocus: sudo apt-get install ros-kinetic-usb-cam uvcdynctrl 2.Open … Calibrating a Monocular Camera with ROS Read More »

Tutorials for MagniThis document discusses running our fiducial based navigation software on a Ubiquity Robotics robot base, using the supported Raspberry Pi camera. It also assumes that you have a workstation with ROS installed, which is connected to a network in common with the robot. You will need a printer, too.
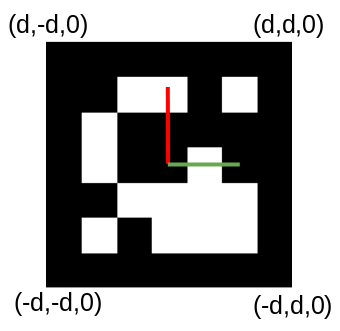
Great information about how to use Fiducials for simple following and navigation

Pose estimation is of great importance in many computer vision applications: robot navigation, augmented reality, and many more. This process is based on finding correspondences between points in the real environment and their 2d image projection. This is usually a difficult step, and thus it is common to use synthetic or fiducial markers to make it easier.
Computer Vision, Deep Learning, and OpenCV courses from PyImageSearch and Dr. Adrian Rosebrock
