13-05-2022
Link Blog
AI/ML 96
Academia 38
Design 86
Engineering 37
Entrepreneurship 17
Hobbies 25
How To 113
Productivity 535
Programming 222
Robotics 119
Software Engineering 226
11 collections · 1535 total posts
May 2022
10-05-2022
Wooden machines and contraptions
Source: woodgears.ca
09-05-2022
pkolaczk/fclones: Efficient Duplicate File Finder
Source: github.com
Efficient Duplicate File Finder. Contribute to pkolaczk/fclones development by creating an account on GitHub.
09-05-2022
⭐
A collection of handy Bash One-Liners
Source: github.com
A collection of handy Bash One-Liners and terminal tricks for data processing and Linux system maintenance. - onceupon/Bash-Oneliner: A collection of handy Bash One-Liners and terminal tricks for d...
There are just so many that I can always use a refresher! Linked is a nice long list of bash one liners, tips and tricks. For example, I am always unsure of sed and bash conditionals. So this linked article is helpful!
⭐ Marked as Important
08-05-2022
Bartosz Ciechanowski
Source: ciechanow.ski
Interactive articles about physics, math, and engineering. Amazing explanations. Watches. Gears. Gps.
April 2022
29-04-2022
Yale OpenHand Project
Source: eng.yale.edu
The Yale OpenHand Project is a movement to advance the design and use of robotic hands designed and built through rapid-prototyping techniques in order to encourage more variation and innovation in mechanical hardware.
24-04-2022
Red Circle Postmark Logo | DesignEvo Logo Maker
Source: designevo.com
DesignEvo s logo maker helps you create custom logos in minutes for free, no design experience needed Try with millions of icons and 100 fonts immediately!
24-04-2022

Custom Shirts - Design Custom T-Shirts Online | 40% OFF
Source: alliedshirts.com
Custom Shirts! #1 Leader in Custom T-Shirts. Create custom t-shirts for your team, business, school, event and more. FREE SHIPPING!
24-04-2022
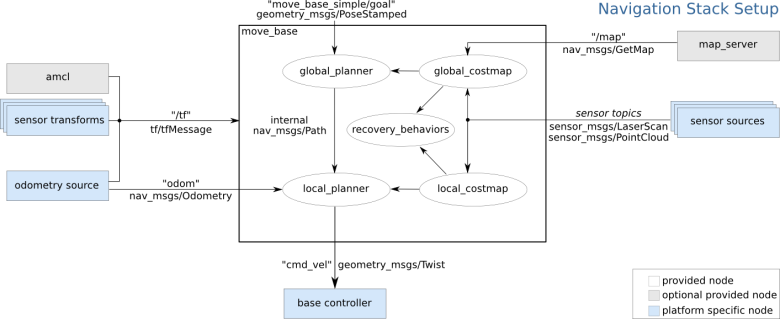
navigation/Troubleshooting - ROS Wiki
Source: wiki.ros.org
17-04-2022

Panasonic Lumix DMC-ZS100 (Lumix DMC-TZ100): Digital Photography Review
Source: dpreview.com
Expert news, reviews and videos of the latest digital cameras, lenses, accessories, and phones. Get answers to your questions in our photography forums.
14-04-2022
Engineering & Computer Science - Google Scholar Metrics
Source: scholar.google.com
Great list of top publications
14-04-2022
⭐

Freedom Robotics
Source: freedomrobotics.com
Freedom Robotics creates powerful control and monitoring software to enable the next generation of robotics companies to build, operate, and scale robots and robotic fleets.
14-04-2022

myAGV - Mecanum wheels Lidar High-precision camera carkit
Source: shop.elephantrobotics.com
Mecanum wheel Lidar High-precision camera myAGV is jointly developed by Elephant Robot and Huaway. The manipulator uses mycobot and loads camera Eye-in-Hand design. myAGV adopts Mecanum wheel + lidar + high-precision camera. Control mode: autonomous navigation, handle control, keyboard control, etc.
13-04-2022
13-04-2022
How to Set Up the ROS Navigation Stack on a Robot – Automatic Addison
Source: automaticaddison.com
Good information about setting up and conviguring navigation
09-04-2022
08-04-2022
Head-First Kubernetes
Source: head-first-kubernetes.github.io
A Kubernetes tutorial for complete beginners.
03-04-2022
An Intuitive Guide to Linear Algebra – BetterExplained
Source: betterexplained.com
01-04-2022
demos/follow.py at master · UbiquityRobotics/demos
Source: github.com
Robot demos. Contribute to UbiquityRobotics/demos development by creating an account on GitHub.
March 2022
29-03-2022
jrlandau/fiducials-1: Simultaneous localization and mapping using fiducial markers.
Source: github.com
Simultaneous localization and mapping using fiducial markers. - jrlandau/fiducials-1: Simultaneous localization and mapping using fiducial markers.